Геометрические векторы. Векторы.Основные понятия. Операции над векторами. Введение в теорию линейных пространств. Вещественное линейные пространство. Линейная зависимость. Геометрический смысл линейный зависимости. Векторная алгебра. Координаты вектора. Координаты точки.
Решение задач и выполнение научно-исследовательских разработок:
Отправьте запрос сейчас: irina@bodrenko.org
математика, IT, информатика, программирование, статистика, биостатистика, экономика, психология
Решение задач: по математике, IT, экономике, психологии
Аналитическая геометрияBodrenko.com Bodrenko.org
3.1 Координаты вектора.
1. Пусть e1 − базис V1 и а − произвольный вектор из V1.
Отложив эти векторы от одной точки О прямой V1 (рис. 2,а) ,
так что e1 = ,
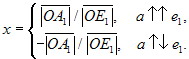
а = 1, получим, что а = xe1, где
(3.1.1)
Введем на прямой V1 направление: пусть положительное направление на прямой совпадает с
направлением базисного вектора e1. Тогда согласно (3.1.1) и (1.1.1) получим
(3.1.2)
Ось, положительное направление которой совпадает с направлением вектора e1, будем называть осью,
определенной вектором e. 2. Пусть e1, e2 − базис V2
и а − произвольный вектор из V2. Отложив эти векторы от одной точки О плоскости V2 (рис. 2,б), так что
e1 = 1, e2 = 2, а = , введя направления на прямых
ОЕ1 и OE2, совпадающие с направлениями базисных векторов e1 и e2, получим в соответствии с (3.1.2), что а =
xe1 + ye2,
(3.1.3)
где А1, A2 − проекции точки А на прямые OE1 и OE2 параллельно соответственно прямым OE2 и OE1.
3. Пусть e1, e2, e3 − базис V3 и a − произвольный
вектор из V3. Поступая аналогично (рис. 2,в), получим а = xe1 + ye2 +
ze3,
(3.1.4)
где A1, A2, A3 − проекции точки А на прямые
OE1, OE2 и OE3,параллельные соответственно плоскостям OE2E3, OE1E3 и OE1E2.
Содержание Предыдущая Следующая
 ,
а =
,
а =  1, получим, что а = xe1, где
1, получим, что а = xe1, где
 (3.1.1)
(3.1.1)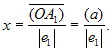 (3.1.2)
(3.1.2)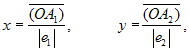 (3.1.3)
(3.1.3) (3.1.4)
(3.1.4)